I. Systemübersicht
1. Projekthintergrund
In den letzten Jahren hat sich der illegale Gütertransport auf Autobahnen zu einem gravierenden Problem entwickelt, das die nationale Verkehrssicherheit gefährdet. Er führt zu einer Überlastung von Autobahnen und Brücken und verkürzt deren Lebensdauer erheblich. Gleichzeitig sinkt die Verkehrssicherheit stark, was immer wieder zu Verkehrsunfällen führt. Zudem trägt er zu Staus und Umweltverschmutzung bei.
Die Regierungen auf allen Ebenen des Landes haben ihre Bemühungen zur Bekämpfung der Überladung von Fahrzeugen auf den Autobahnen kontinuierlich verstärkt und dabei wichtige Teilerfolge erzielt. Aufgrund komplexer sozioökonomischer Faktoren ist die Lage der Überladungsbekämpfung jedoch weiterhin sehr angespannt, und die Gefahr eines erneuten Anstiegs besteht weiterhin. Die Konsolidierung der bisherigen Maßnahmen und die kontinuierliche Förderung der Überladungsbekämpfung stehen daher unter großem Druck. Die Bekämpfung der Überladung ist somit eine langfristige und kontinuierliche Aufgabe, die konsequent verfolgt werden muss. Es ist entscheidend, die Bekämpfung der Überladung in einen langfristigen Mechanismus zu integrieren. Dieser Mechanismus dient nicht nur der rechtlichen Abschreckung von überladenen Fahrzeugen, sondern kann auch seine Funktionen erweitern, indem er Straßenkontrollen durchführt, gegen die Spontaneität illegaler Transportvorgänge vorgeht und verschiedene illegale Transportformen, einschließlich der Überladung, zeitnah unterbindet und beseitigt.
2. Einführung in das Wägesystem
Das Wiegeprinzip einer statischen Lkw-Waage besteht darin, alle Fahrzeuge auf der Wiegeplattform zu parken und das Gesamtgewicht zu ermitteln. Sie zeichnet sich durch hohe Wiegegenauigkeit und klare nationale Normen aus. Herkömmliche Lkw-Waagen erfassen jedoch nur das Gesamtgewicht des Fahrzeugs, nicht aber die Achslast. Sie können zwar feststellen, ob das Gesamtgewicht des Fahrzeugs überladen ist, nicht aber, ob die Achslast überladen ist. Daher erfüllen sie nicht die Anforderungen der Straßenverkehrsbehörden hinsichtlich der Kontrolle überladener Transporte.
Dieser Plan vereint die langjährige Erfahrung unseres Unternehmens in der Entwicklung und Fertigung von Überlasterkennungssystemen mit deren praktischer Anwendung in verschiedenen Regionen des Landes. Er analysiert sorgfältig den Einsatz verschiedener am Markt erhältlicher Überlasterkennungssysteme und berücksichtigt umfassend die spezifischen Bedürfnisse von Straßenbaubehörden im Bereich des Überlastungsmanagements. Mithilfe fortschrittlicher Technologie und einzigartiger Designansätze wird ein dynamisches, hochpräzises System zur Erkennung von Fahrzeuggewicht und Achstyp entwickelt. Es kann sowohl Achsgewicht als auch Gesamtgewicht erfassen und den Achstyp unterscheiden. Die Genauigkeit der Achsgewichtsmessung wird dadurch deutlich verbessert.
2. Zusammensetzung des Überlast- und Übergrenzsystems
1. Systemmerkmale
Es kann Fahrzeuge wiegen, die mit niedriger Geschwindigkeit vorbeifahren, und automatisch feststellen, ob das Fahrzeuggewicht oder die Achslast überladen ist;
Es kann die Anzahl der Achsen, die Achsgruppen, die Achslast und das Fahrzeuggewicht ermitteln;
Es kann vollständige Fahrzeugwiegeinformationen generieren, einschließlich Achstyp, Achsgewicht, Achsgruppe und Gesamtgewicht;
Es kann Wägeinformationen über die Datenschnittstelle an den Computer übermitteln;
Der Kern des Systems besteht aus ausgereiften und zuverlässigen Komponenten, die alle modular aufgebaut, wartungsfreundlich und erweiterbar sind und somit die hohe Zuverlässigkeit des Systems gewährleisten.
Die Systemsoftware ist ausgereift, äußerst zuverlässig, die Daten sind vollständig und effektiv und können uneingeschränkt geteilt werden, wodurch die Arbeitseffizienz effektiv gesteigert und verschiedene Managementlücken weitestgehend beseitigt werden.
2. Systemprozess
Der Lkw wird in die Wiegespur der Überlaststation eingeführt, und das Kennzeichenerkennungssystem identifiziert die Kennzeichennummer;
Der Reifenidentifikator (Achsenidentifikator) dient zur Bestimmung der Achsenanzahl, woraufhin das Fahrzeugwiegesystem mit dem Wiegen beginnt, die Achsgruppe ermittelt und das Achsgewicht berechnet wird.
Wenn alle Fahrzeuge den Fahrzeugtrenner passiert haben und auf die Wiegeplattform gelangen und sich die Waage in einem relativ ausgeglichenen Zustand befindet, wird das Gesamtgewicht des Fahrzeugs erfasst und die Achslast ermittelt.
Das Wiegesystem sendet Wiegeinformationen (Kennzeichen, Achsenanzahl, Achslast, Gesamtgewicht usw.) an den Detektionsrechner. Dieser ermittelt, ob eine Überschreitung vorliegt, und zeigt die entsprechenden Informationen wie Fahrzeuggewicht, Überschreitungsquote und Überschreitungsrate auf dem Display an.
Nachdem das Fahrzeug die entsprechenden Vorgänge abgeschlossen hat, lässt das Fahrzeugleitpersonal die Fahrzeuge, die die zulässige Höchstgeschwindigkeit nicht überschritten haben, gemäß den Informationen auf dem Bildschirm den Erfassungsbereich verlassen, geleitet die Fahrzeuge, die die zulässige Höchstgeschwindigkeit überschritten haben, zur Bearbeitung in den Stationsbereich, druckt das Formular zur Überprüfung der Fahrzeuge, die die zulässige Höchstgeschwindigkeit überschritten haben, und führt die entsprechenden Abrechnungsvorgänge durch;
3. Systemzusammensetzung und Layoutplan
3.1 Systemzusammensetzung
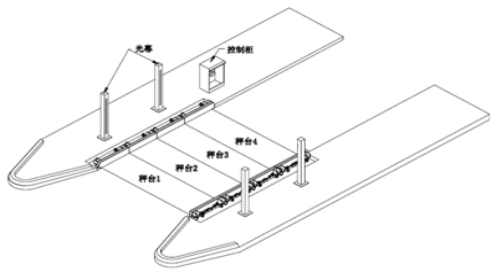
Das Über- und Überlastungssystem besteht aus einer dynamischen Viertisch-Achswaage von ZDG, einem Steuergerät, einem Infrarot-Fahrzeugtrenner, einer Radachsenidentifizierungsplattform, einem Steuerschrank (optionale Ausstattung: Kennzeichenerkennungssystem, LED-Großbildschirm-Anzeigesystem, Sprachansagesystem, Fahrzeugführungssystem, Industriecomputer, Ticketdrucker, USV-Unterbrechungsfreie Stromversorgung, Software für das Über- und Überlastungserkennungssystem, Überwachungssystem) sowie weiterem Zubehör und Kabeln.
3.2 Systemlayoutdiagramm wie abgebildet:
Arbeitsablauf:
1) Die Fahrzeuge fahren nacheinander unter Einhaltung eines Sicherheitsabstands in die Fahrspur ein und lösen dabei den Infrarot-Fahrzeugtrenner aus;
2) Jede Achse des Fahrzeugs durchfährt die Mehrflächen-Wiegeplattform;
3) Der Anzeigecontroller verarbeitet das vom Sensor der Wiegeplattform und vom Radsensor erhaltene Wiegesignal, trennt die Achsen nach logischen Bedingungen und bewältigt Sondersituationen effektiv;
4) Das Heck des Fahrzeugs verlässt die Mehrflächen-Wiegeplattform und den Infrarot-Fahrzeugtrenner;
5) Der Anzeigecontroller beurteilt umfassend das Fahrzeugendsignal auf der Grundlage des vom Infrarot-Fahrzeugtrenner erfassten Okklusionssignals und des vom Wägesensor erfassten Wägesignals;
6) Der Anzeigecontroller verarbeitet das Wiegesignal, das beim Durchfahren der Wiegeplattform durch das oben genannte Fahrzeug empfangen wird;
7) Der Anzeigeregler erfasst die vollständigen Wiegeinformationen des gesamten Fahrzeugs. Zu den vollständigen Wiegeinformationen gehören unter anderem die Fahrzeuggeschwindigkeit, der Achstyp, das Achsgewicht, das Achsgruppengewicht und das Gesamtgewicht.
8) Schließen Sie den Wiegevorgang für ein Fahrzeug ab und warten Sie, bis das nächste Fahrzeug gewogen wurde.
9) Während des gesamten Arbeitsprozesses bewältigt das System automatisch verschiedene Sondersituationen, wie z. B. vollständiges Ein- und Ausfahren, wiederholtes Ein- und Ausfahren sowie einen längeren Aufenthalt auf der Wiegeplattform;
Das System kann die Situation mit dem nachfolgenden Fahrzeug automatisch und effektiv handhaben, und die Gewichtsmessung des nachfolgenden Fahrzeugs hat keinen Einfluss auf die Datengenauigkeit.

Veröffentlichungsdatum: 20. Februar 2025